Pose Estimation: The Hidden Challenges Behind Human Understanding
Pose estimation has become one of the most impactful technologies in computer vision. From rehabilitation systems and fitness coaching to healthcare monitoring, industrial safety, sports analytics, surveillance, and human-machine interaction, the ability to understand human movement through cameras is creating entirely new possibilities.
Most people see pose estimation as a straightforward problem:
"Detect body joints and connect them into a skeleton."
But real-world deployment is far more complicated.
The moment pose estimation systems move from controlled environments into real-world applications, localization errors begin appearing. Even highly accurate models can struggle because human movement is dynamic and environments are unpredictable.
The challenge is not simply detecting keypoints.
The challenge is understanding humans accurately under changing conditions.
Why Localization Errors Occur
Localization errors happen when the system predicts incorrect body joint positions such as shoulders, elbows, knees, hips, or ankles.
In applications such as:
- Physiotherapy
- Elderly monitoring
- Human rehabilitation
- Sports analysis
- Industrial safety
- Human behavior understanding
even a small localization error can significantly impact the final outcome.
For example:
A small error in elbow position may lead to:
❌ Wrong joint angle estimation
❌ Incorrect posture assessment
❌ False rehabilitation feedback
❌ Misinterpreted movement quality
❌ Incorrect stress prediction on muscles
This makes robustness extremely important.
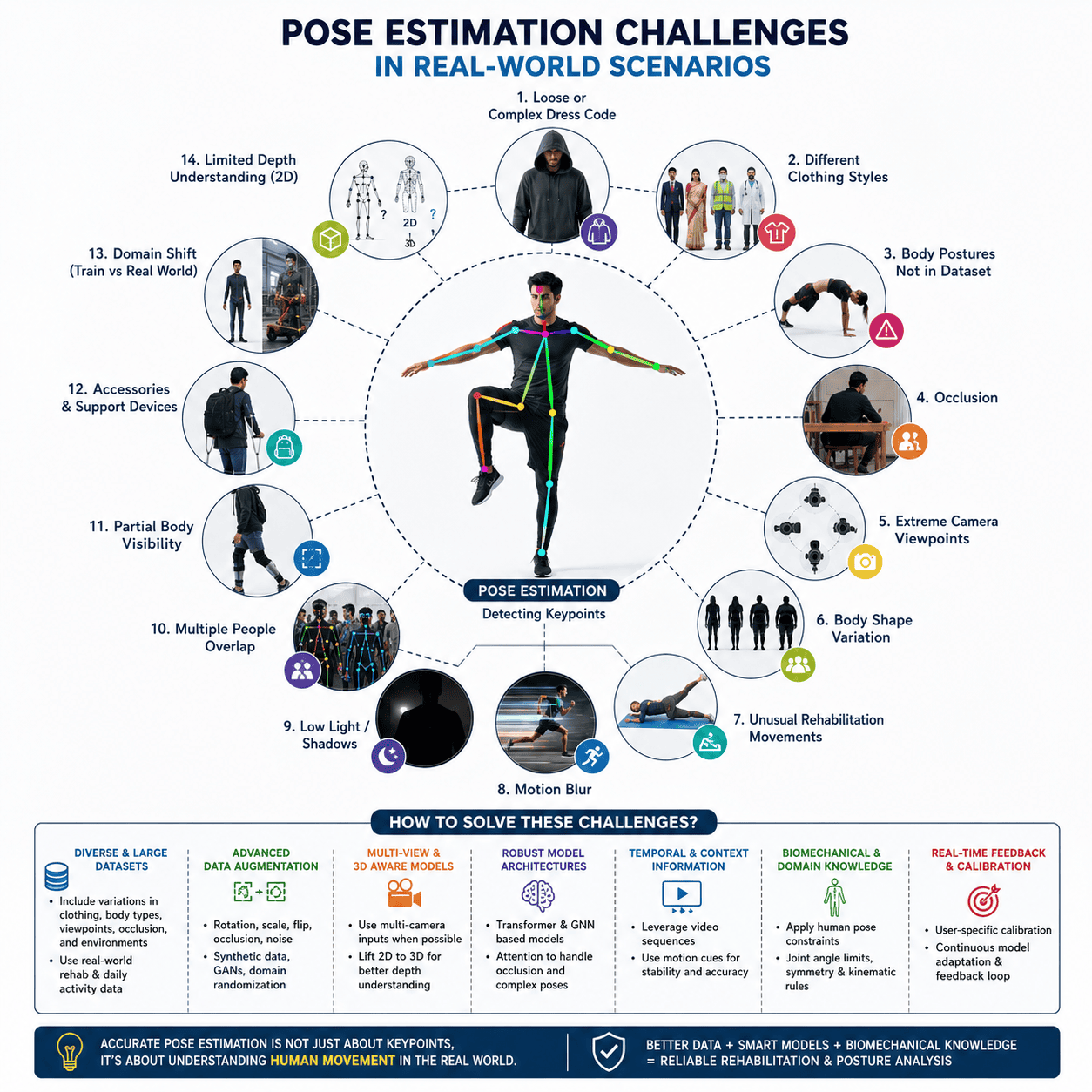
Key Challenges in Real-World Pose Estimation
1. Clothing and Dress Code Variability
Human body structures become difficult to interpret when individuals wear:
- Loose hoodies
- Long coats
- Traditional clothing
- Safety jackets
- Medical gowns
- Protective equipment
Heavy clothing can hide body contours and create ambiguity in joint localization.
2. Missing Body Postures in Training Datasets
Datasets frequently contain limited movement diversity.
Real-world applications may involve:
- Yoga movements
- Rehabilitation exercises
- Elderly movement patterns
- Industrial worker activities
- Sports actions
- Unusual body positions
When systems encounter postures that were not sufficiently represented during training, prediction accuracy decreases.
3. Occlusion Problems
Body parts often disappear due to:
- Tables
- Furniture
- Machines
- Other people
- Self-occlusion
If an arm or leg becomes hidden, systems may incorrectly infer its location.
4. Extreme Camera Angles
Most datasets are collected under standard viewpoints.
Real-world deployments include:
- Ceiling-mounted cameras
- Side views
- Low-angle cameras
- Surveillance cameras
- Mobile devices
Changes in viewpoint can create major localization challenges.
5. Human Diversity
Humans naturally vary in:
- Height
- Weight
- Body proportions
- Age
- Mobility patterns
- Physical limitations
Models trained on narrow distributions may struggle to generalize.
6. Motion Blur
Fast movement creates blur during:
- Running
- Sports activities
- Sudden body movement
- Industrial operations
Blur removes important visual information.
7. Lighting Variations
Real environments rarely maintain ideal conditions.
Challenges include:
- Low light
- Strong shadows
- Backlighting
- Outdoor illumination changes
Poor lighting affects feature extraction and keypoint prediction.
8. Multiple Person Interaction
Crowded environments create complexity:
- Overlapping people
- Intersecting limbs
- Human interaction patterns
Models may confuse body parts between individuals.
9. Partial Visibility
Sometimes only part of the body appears in the frame:
- Upper body only
- Lower body only
- Entry or exit scenarios
Incomplete information reduces accuracy.
10. Domain Shift
Models trained in controlled environments often fail in deployment environments.
Example:
Training Environment:
✔ Controlled background
✔ Stable lighting
✔ High-quality cameras
Real Deployment:
❌ Factories
❌ Hospitals
❌ Homes
❌ Outdoor environments
The gap between these environments frequently becomes a major source of performance degradation.
How Can We Solve These Challenges?
Improving pose estimation requires much more than larger models.
Diverse Real-World Datasets
Include variation in:
- Clothing
- Lighting
- Human activities
- Camera viewpoints
- Body types
Advanced Data Augmentation
Introduce:
- Occlusion simulation
- Synthetic data generation
- Rotation
- Blur simulation
- Scaling
- Noise injection
Multi-View and 3D Models
Using multiple camera perspectives helps:
✔ Reduce occlusion
✔ Improve depth understanding
✔ Increase localization precision
Temporal Understanding
Instead of treating frames independently:
- Learn movement patterns
- Track continuity
- Use historical information
Human Biomechanics Knowledge
Future systems should understand:
- Joint angle limits
- Human movement constraints
- Muscle stress relationships
- Symmetry
Continuous Feedback Systems
Real-world adaptation and calibration improve long-term performance.
How We Handle These Challenges for Our Clients
At Visual Grab, we understand that successful computer vision deployment is not achieved by simply selecting a model and training it.
Real-world systems require understanding of data, environmental variability, and business objectives.
For pose estimation and human understanding solutions, we focus on:
✅ Building datasets that capture real deployment variability
✅ Designing augmentation pipelines that simulate challenging conditions
✅ Using multi-view and temporal methods where needed
✅ Incorporating domain knowledge and biomechanics understanding
✅ Creating continuous feedback systems for iterative improvement
✅ Validating models using real-world scenarios rather than controlled assumptions
Our goal is not simply achieving benchmark accuracy.
Our goal is building solutions that continue performing when exposed to the complexity of the real world.
Final Thought
Pose estimation is not about connecting dots across a human body.
The future lies in understanding movement, context, biomechanics, and human behavior.
Accurate pose estimation is not about detecting points.
It is about understanding people.
— Dr. Raj Gupta
Founder, Visual Grab